Robot berwajah bayi pemberani mengenakan jetpack untuk petualangan berikutnya-menjadi robot humanoid pertama yang terbang
Para peneliti telah menunjukkan pengangkat vertikal pertama yang berhasil dari robot humanoid – langkah besar menuju robot terbang yang meniru kemampuan manusia.
Robot baru, yang dijuluki IronCub MK3, menggunakan empat pendorong untuk mencapai dorongan vertikal, dua dibangun di lengannya dan dua di jetpack yang dipasang di punggungnya.
Dalam rekaman yang dirilis oleh Institut Teknologi Italia (IIT) Ke YouTube pada tanggal 18 Juni, robot yang dipenuhi topeng ditahan dari suspender dan kemudian diaktifkan, mengangkat sekitar 20 inci (50 sentimeter) dari tanah menggunakan pendorongnya.
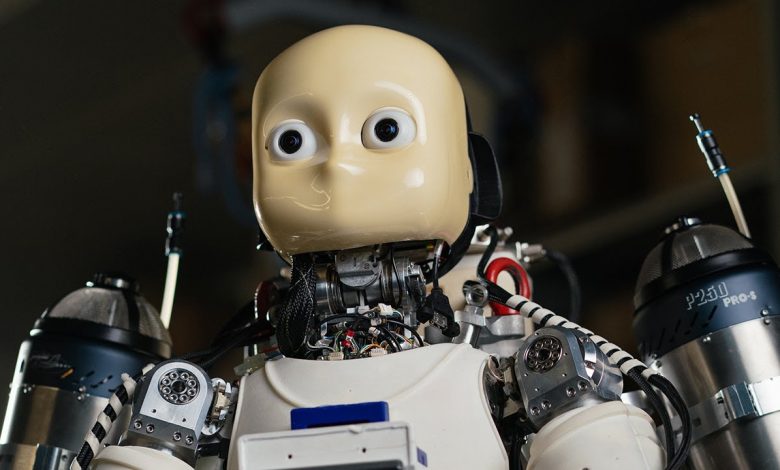
Itu icub Robot yang didasarkan pada humanoid IIT adalah seperti anak-anak dalam ukuran dan penampilan. Tingginya 3 kaki (1 meter) sementara berat 49 pound (22 kilogram), mengadopsi dimensi seperti anak, dan mengenakan kepala “wajah bayi” yang sangat halus dan mengkilap.
Pertama kali diluncurkan pada tahun 2009 oleh Konsorsium RobotCub dari universitas -universitas Eropa, ini dirancang untuk menjadi testbed untuk penelitian tentang kognisi manusia dan kecerdasan buatan (Ai) dan telah digunakan di proyek yang tak terhitung jumlahnya Selama 16 tahun terakhir.
Dalam studi yang sesuai yang menggambarkan robot, diterbitkan 1 Juni di arxiv Preprint Server, insinyur IIT mengatakan versi robot augmented mereka adalah robot humanoid terbang bertenaga jet pertama yang dirancang untuk lepas landas. Mereka menambahkan karya ini menyoroti kemungkinan baru yang disajikan oleh robot humanoid terbang.
Berbeda dengan banyak platform robot lain yang saat ini dalam pengembangan, yang biasanya berfokus secara eksklusif pada penggerak dan manipulasi berbasis darat, menambahkan mobilitas udara dapat membuka jalan untuk bantuan dalam misi pencarian dan penyelamatan, melintasi bangunan yang runtuh dan daerah banjir, atau medan lain yang tidak dapat diakses oleh manusia, para ilmuwan mengatakan dalam penelitian ini.
Menggabungkan penerbangan dengan kemampuan untuk berinteraksi dengan lingkungannya, robot semacam ini dapat membersihkan puing -puing dan membantu dalam menemukan atau bahkan mengekstraksi korban.
Para penulis penelitian juga menunjukkan bahwa robot humanoid terbang dapat melakukan perbaikan pada struktur yang sulit untuk diakses manusia, seperti bagian bawah jembatan. Mereka bahkan dapat dikerahkan di lingkungan berbahaya di mana orang tidak dapat beroperasi dengan aman, seperti tempat kebocoran nuklir atau kimia.
Robot terbang bertenaga jetpack pertama di dunia
IronCub didasarkan pada platform ICUB3 IIT. Sistem ini dirancang untuk memungkinkan robot untuk meniru sejumlah kemampuan manusia karena dikendalikan dari jarak jauh oleh operator yang mengenakan tampilan head-up head-up head-up (HUD) virtual reality (VR) dan peralatan khusus lainnya.
Untuk melengkapi ICUB untuk penerbangan, tim menambahkan kurung pemasangan beban untuk mengamankan jetpack dan tulang belakang titanium baru untuk mendukung beratnya. Karena versi sebelumnya dari IronCub memiliki masalah dengan menangkap api dari knalpot thrusters, panel dan penutup tahan panas ditambahkan ke sasis ICUB. Sudut kemiringan Thrusters juga disesuaikan untuk membantu dengan stabilitas dalam penerbangan dan untuk memiringkan knalpot dari tubuh robot.

Untuk versi ini, lengan robot dan tangan telah dihapus untuk membuat ruang bagi pendorong yang dipasang di lengan, tetapi tim mengatakan lengan tersebut masih sepenuhnya kompatibel dan akan dibaca dalam iterasi nanti.
Untuk memastikan sasis dapat menangani tekanan lepas landas dan penerbangan, tim melakukan analisis metode elemen hingga-suatu teknik pemecahan masalah yang berpusat di sekitar memecah struktur menjadi komponen yang saling berhubungan yang lebih kecil. Akibatnya, mereka menerapkan beban aksial 750 newton (tiga kali dorong puncak masing -masing turbin) ke kurung mesin jet.
Salah satu tantangan utama untuk mencapai penerbangan dalam robot humanoid jenis ini adalah memperhitungkan semua sendi dan titik aktuasi dan menyesuaikannya, serta pendorong, dengan cara yang terkoordinasi, sehingga robot tidak berakhir terbang di luar jalur atau terbalik.
Para insinyur mengelola ini dengan apa yang disebut parameter linier yang bervariasi model prediktif (MPC), pengontrol penerbangan kompleks yang terus -menerus menghitung posisi sambungan optimal dan jet throttle.
Para ilmuwan secara luas menguji sistem terlebih dahulu dalam simulasi komputer sebelum kemudian meluncurkan tes dunia nyata, sebagian besar karena risiko keamanan pendorong operasi dengan suhu buang lebih dari 1.112 derajat Fahrenheit (600 derajat Celcius).
Setelah berhasil menunjukkan peluncuran dengan lintasan yang telah ditentukan dan pelacakan yang akurat, tim sekarang berencana untuk memfokuskan upayanya untuk meningkatkan pengontrol penerbangan untuk menangani gangguan eksternal yang mungkin terjadi selama skenario penerbangan nyata, seperti angin atau cuaca buruk lainnya.